Zherui Qiu.
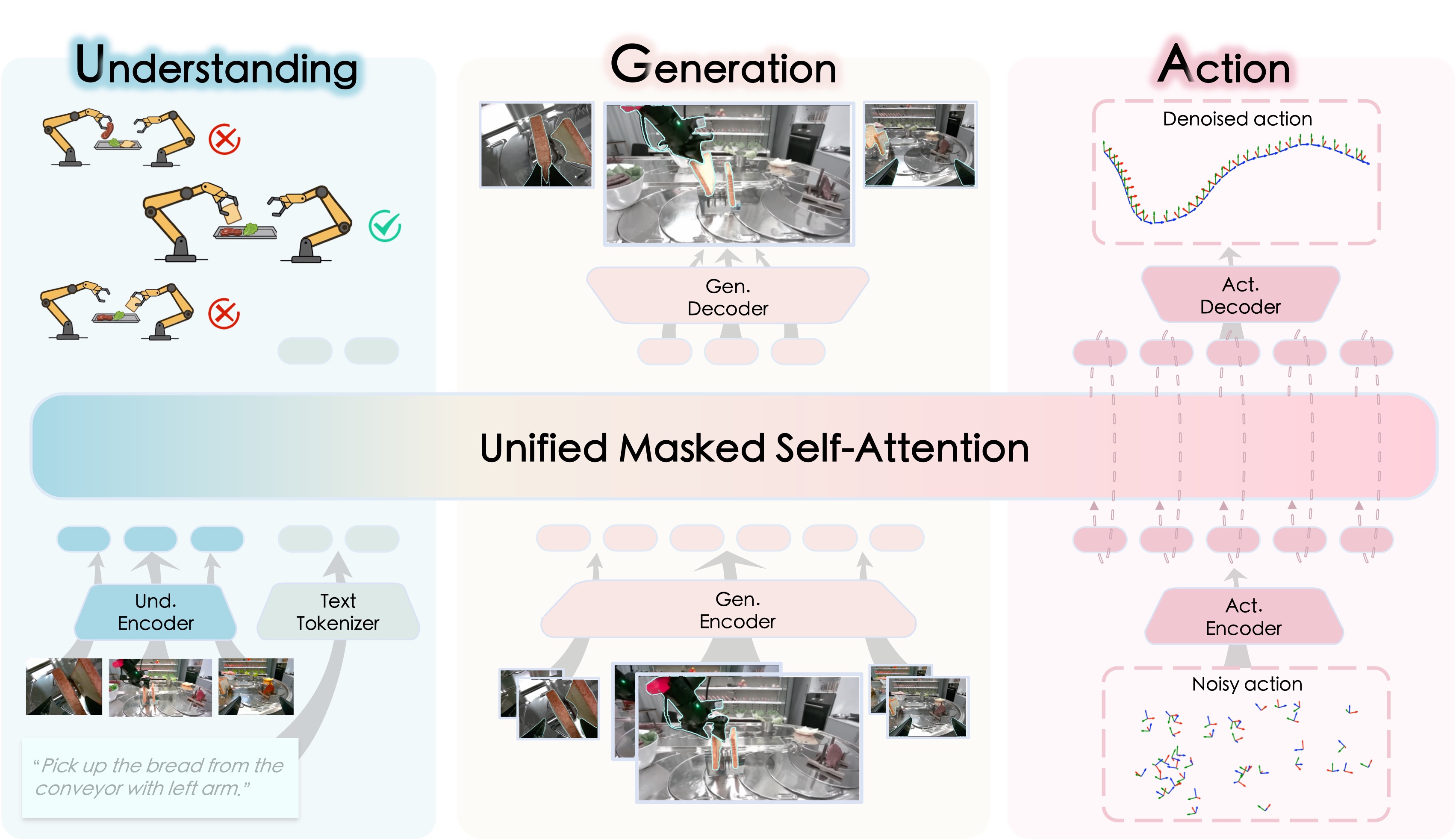
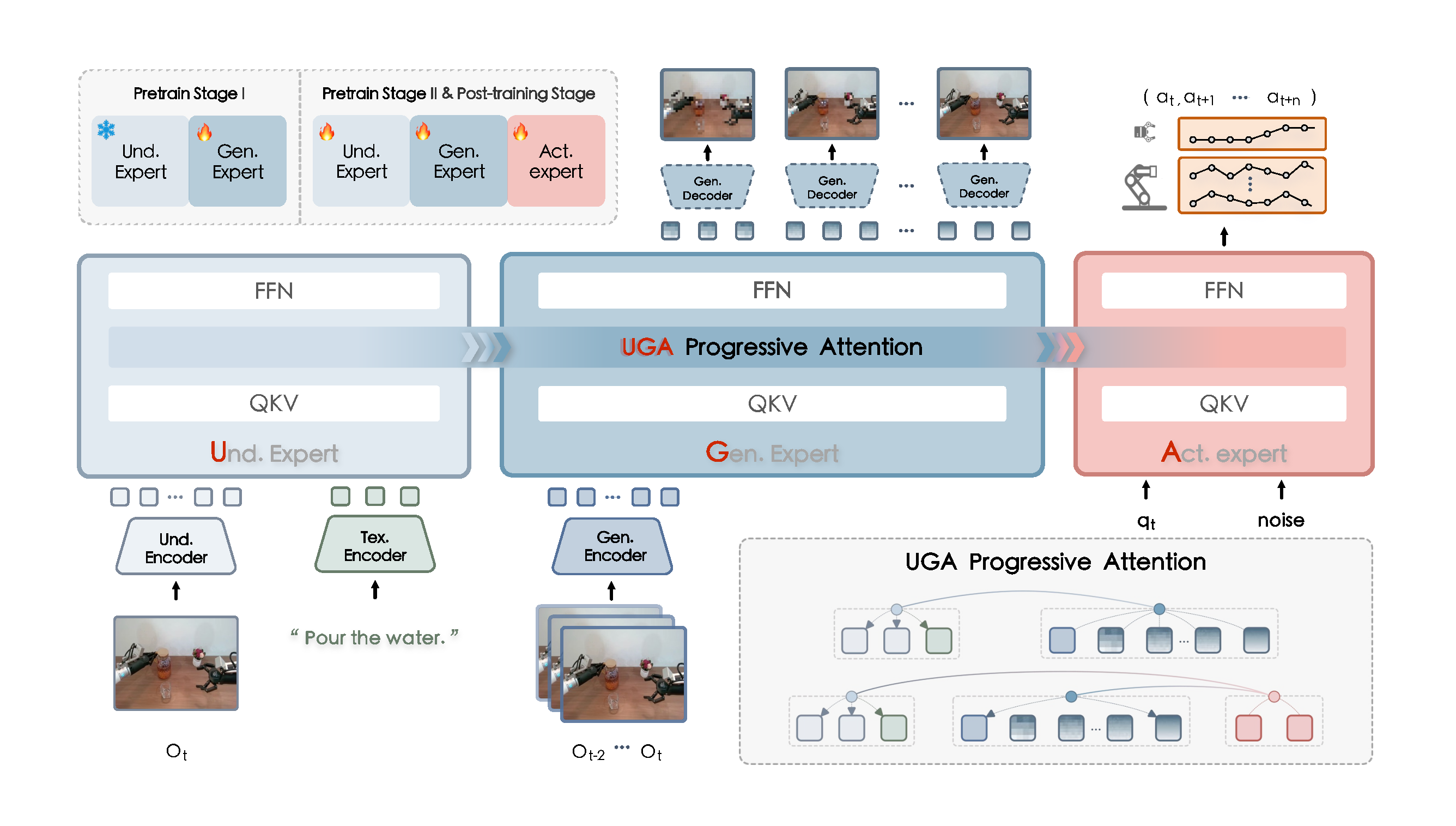
I Empower Robots to Perceive, Imagine, and Execute
A passionate and innovative AI researcher. I design agents that perceive the world, imagine outcomes, and execute them with reliable control. I also harness cutting-edge techniques to craft virtual worlds that are visually stunning and immersive.
"To boldly go where no one has gone before." — Star Trek